Technodiversity Glossary
Technodiversity glossary is a result of the ERASMUS+ project No. 2021-1-DE01-KA220-HED-000032038.
The glossary is linked with the project results of Technodiversity. It has been developed by
Jörn Erler, TU Dresden, Germany (project leader); Clara Bade, TU Dresden, Germany; Mariusz Bembenek, PULS Poznan, Poland; Stelian Alexandru Borz, UNITV Brasov, Romania; Andreja Duka, UNIZG Zagreb, Croatia; Ola Lindroos, SLU Umeå, Sweden; Mikael Lundbäck, SLU Umeå, Sweden; Natascia Magagnotti, CNR Florence, Italy; Piotr Mederski, PULS Poznan, Poland; Nathalie Mionetto, FCBA Champs sur Marne, France; Marco Simonetti, CNR Rome, Italy; Raffaele Spinelli, CNR Florence, Italy; Karl Stampfer, BOKU Vienna, Austria.
The project-time was from November 2021 until March 2024.
Special | A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z | ALL
S |
|---|
Social efficiencySocial efficiency see ergonomics | |
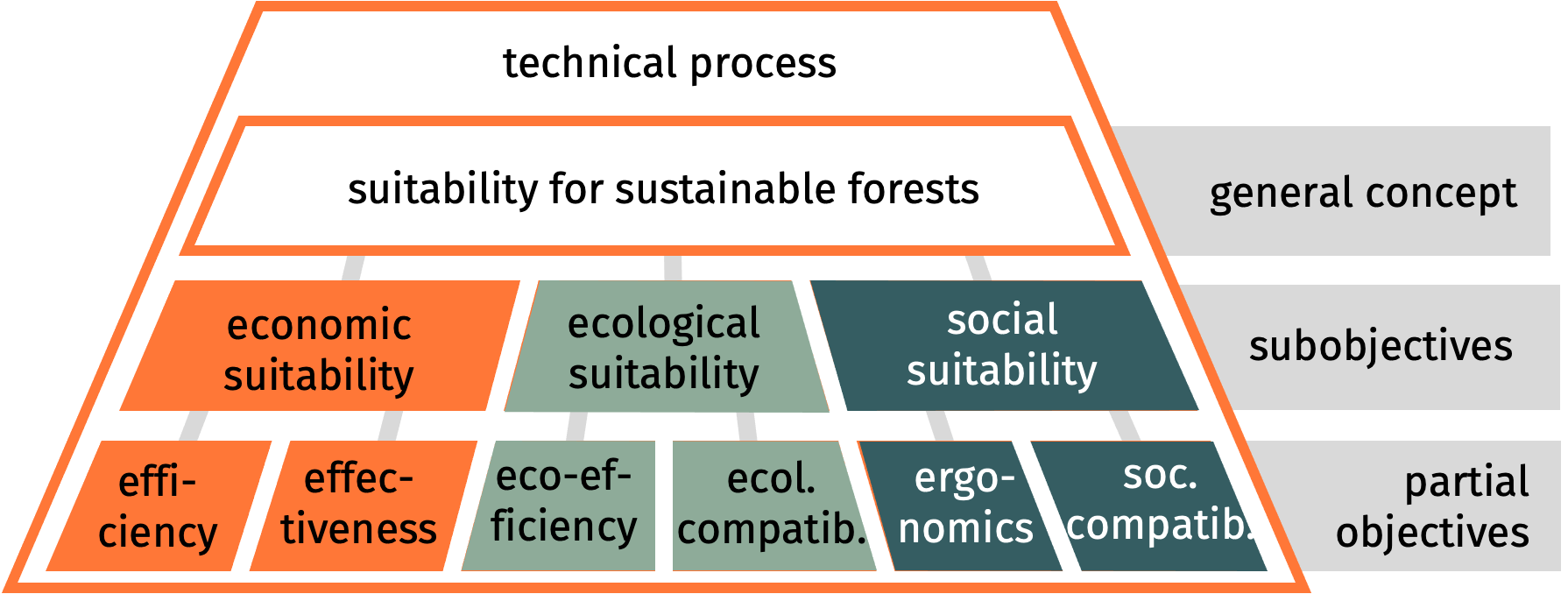
Social suitabilitySocial suitability is one sub-objective of the decision-making process. It corresponds with the social objective of the company in a means-end-relationship: The means should be developed in a way that it fulfills the end that is given by the objective of the company. The social suitability is subdivided into ergonomics and societal compatibility. On the same level are two competing sub-objectives: the economic and the ecological suitability. The relationships between them can be organized by the general concept for technical operations that is given by the company. The societal compatibility deals with the needs of the local society, within which the forest company operates. It is achieved by matching the different demands for recreation, heritage, employment etc. In Technodiversity, we have invented the S-class. Ergonomics, however, is focused on the wellbeing of the workers employed by the forest company, which is responsible for the working sites and methods. Employers must plan and conduct their operations in a way that minimizes the risk for the operators to suffer an accident or become ill. In Technodiversity, we have invented the E-class. Now we combine the assessments for ergonomics and societal compatibility in a 5x5-table, on x-axis the E-class and on y-axis the S-class. As an example, a fully mechanized CTL method with harvester and forwarder falls into the S-class S4 and E-classes E4 (forwarder) and E5 (harvester). Another option, a partly mechanized tree-length method with horse and tractor, falls in S-class 3 and E-classes E1 (horse), E2 (chainsaw), and E3 (tractor). Now the decision maker can mark his individual preferences. Here we chose traffic light colors to represent green (okay), yellow (limited), red (not acceptable). For example, one decision maker might feel uncomfortable with manual work due to safety concerns and prefer mechanized work, instead. Then he marks E1 with red, E2 with yellow, and the other columns with green (left table). Concerning compatibility with recreational needs (in the middle), our decision-maker may want to avoid processing on the forest road. Loading operations, however, could be accepted without constrains. Consequently, S1 and S2 are not acceptable, but all other S-classes are okay for this decision maker. When we combine those assessments (right table), at each intersection the less desirable color is dominant (comparable with the bottle-neck-rule). In our example we see, that the fully mechanized cut-to-length method with harvester and forwarder (fC) fits well to the societal assessment of this company. The partly mechanized method fails, due to the critical assessment of manual and motor-manual work. (See more
under TDiv PR1-A03, -E01, -E04, and E05) 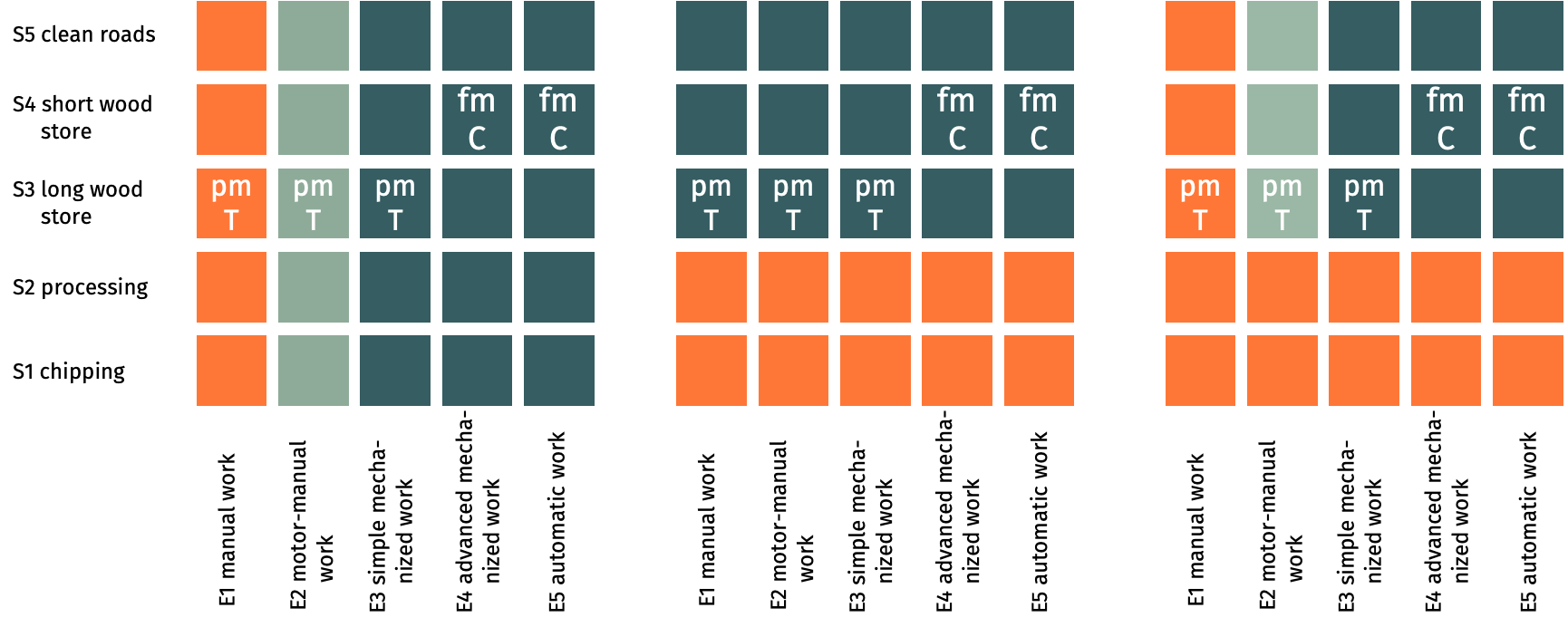 | |
Societal compatibilitySocietal compatibility is a partial objective for decision-making. It wants to avoid disturbances that can occur in conflict with the needs and demands of the public. In forestry people enter the forests to recreate and enjoy their life and feel disturbed by forest operations. Cultural needs of the local population can be disturbed by technical activities, too. A third criterion may be the wish of local people to be employed by the forest company in order to earn money. As criteria in Technodiversity, we use the S-classes for societal needs. Together with its twin ergonomics we can assess the social suitability that is one sub-objective to find the optimal option. Parallel to the social suitability we also should look at the economic and the ecological suitability. For more information about systematics of decision-making, look at objectives and three-step model of optimization. (See more under TDiv PR1-A03, PR1-E02, and -E04) 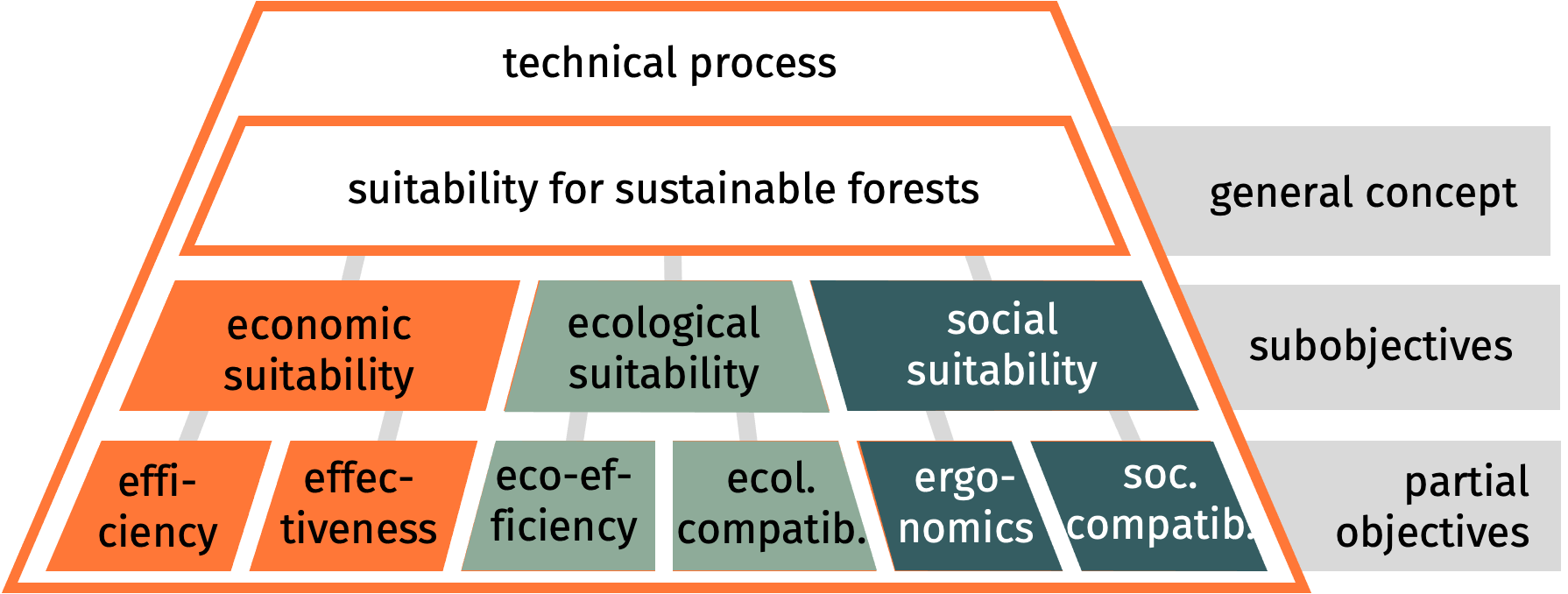 | |
Societal demand for recreationSee recreation | |
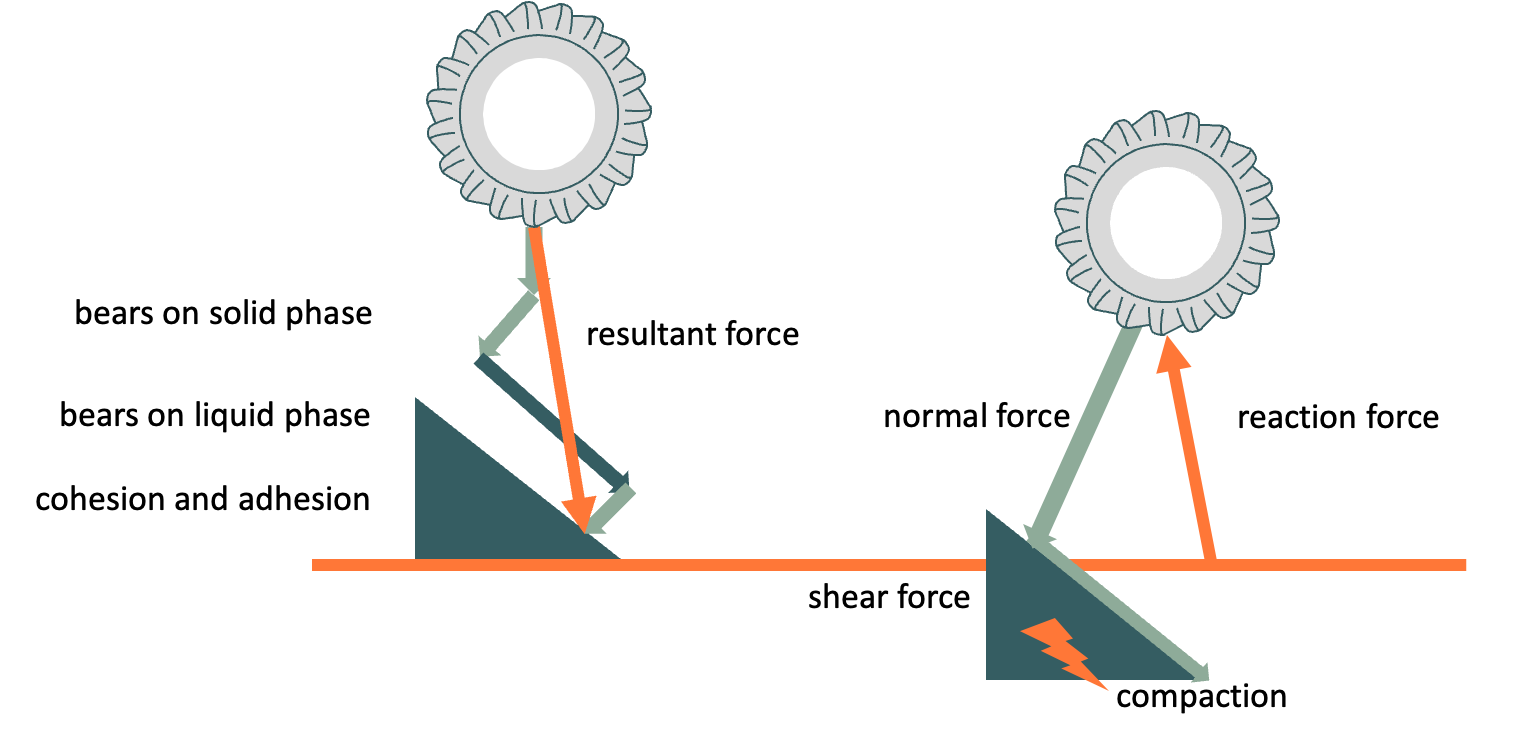
Soil damageThe model of soil damage of Technodiversity acts on the assumption of tree soil states: A) Untouched forest soil: biologically healthy and productive B) Trafficable trail: compacted by former traffic and strong enough for future traffic C) Destroyed trail: impacted by former traffic in a way that is no longer usable. By traffic, a soil moves from untouched soil (A) to trafficable trail (B). After traffic, maybe it has a chance to find back to state (A) by biological (worms, roots…) and physical (frost) influences. As long as this happens in a reasonable time, we call it elastic deformation. But very often the traffic with our heavy machines causes a plastic deformation, which means that no natural regeneration will happen in a reasonable time period. This must not be regarded as damage as long as the technical function of the trail has priority for the owner. Because the compacted trail can be used for future harvesting operations, too, as long as it keeps its technical functionality. This has the advantage that next time the rate of compacted soil will not increase. To reach this, we demand for permanent trails as a central idea of eco-efficiency. For the question, how much of the soil is allowed to be fixed for technical purposes, no absolute answer can be found. This depends on the decision of the owner. Consequently, any further degradation of the soil towards destroyed trail (state C) must be avoided. There are two tactics: To stop the operation immediately when critical signs occur or to shape the harvesting system in a way that the likelihood of any damage is minimized. But sometimes the trail will be destroyed in a way that no more traffic can happen on it. Then it should be repaired by technical means (road construction) to recover the technical functionality. (See more at PR1-D02) | |
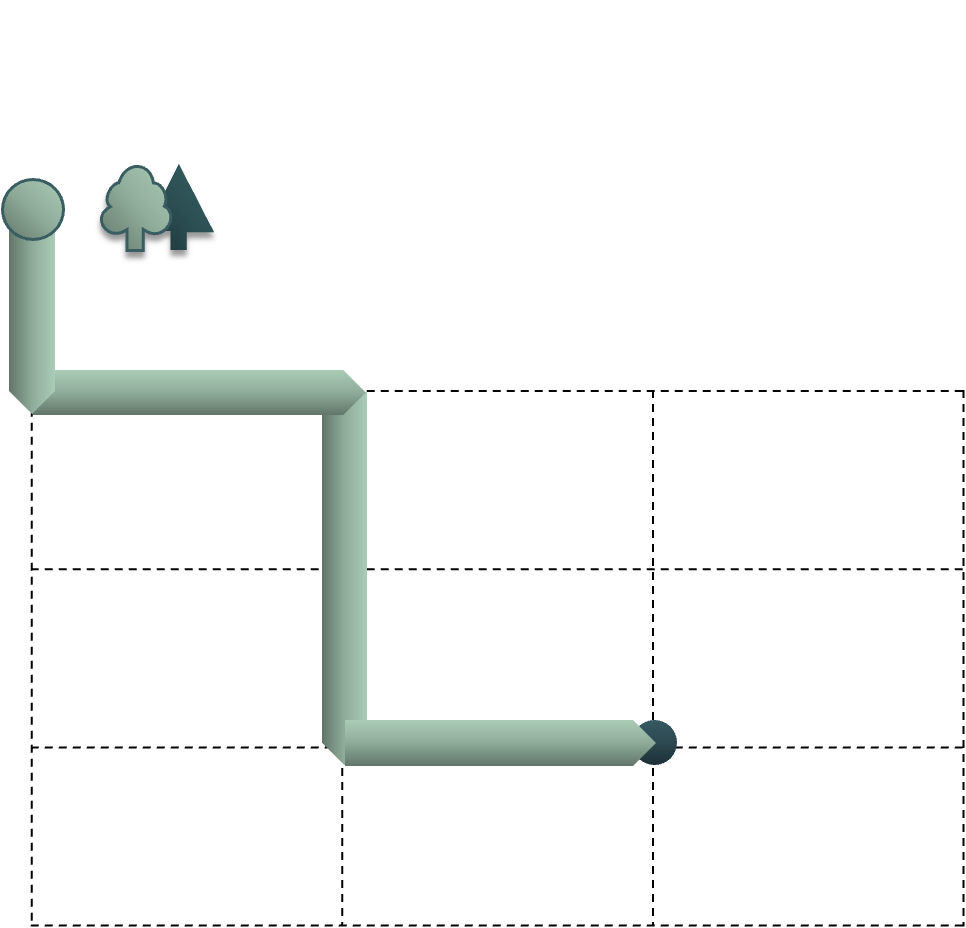
Solutions for „harwarding“ of short logsOne option which can only be executed by a special machine is the “harwarding” of short logs. In this case a special machine, the harwarder, fells the tree, delimbs it, cross-cuts it into logs and skids the logs to the forest road (buffer 10 to 33). All these sub-processes are done in one step without a buffer to interrupt. Since all the sub-processes are done by the harwarder, it is assigned to the mechanized work.
| |

Solutions for chipping at the forest roadTo produce chips (= chipping) at the forest road, full trees (buffer 31 to 34), tree lengths (buffer 32 to 34) or short logs (buffer 33 to 34) can be used. The chipping is a mechanized work and can be executed by a chipper. 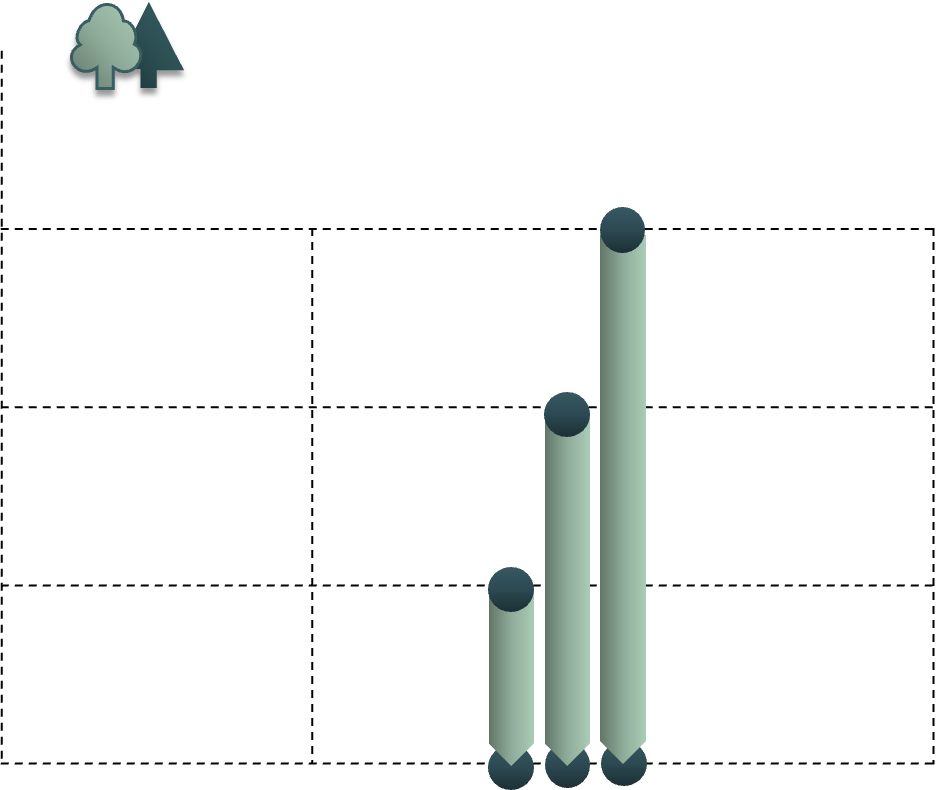 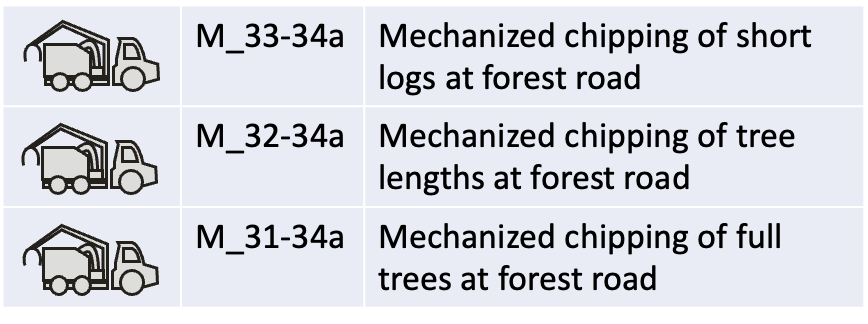 | |
Solutions for chipping on the trailTo produce chips (= chipping) on the trail, full trees (buffer 21 to 24), tree lengths (buffer 22 to 24) or residues (buffer 23 to 24) can be used. The chipping is a mechanized work and can be executed by a chipper. 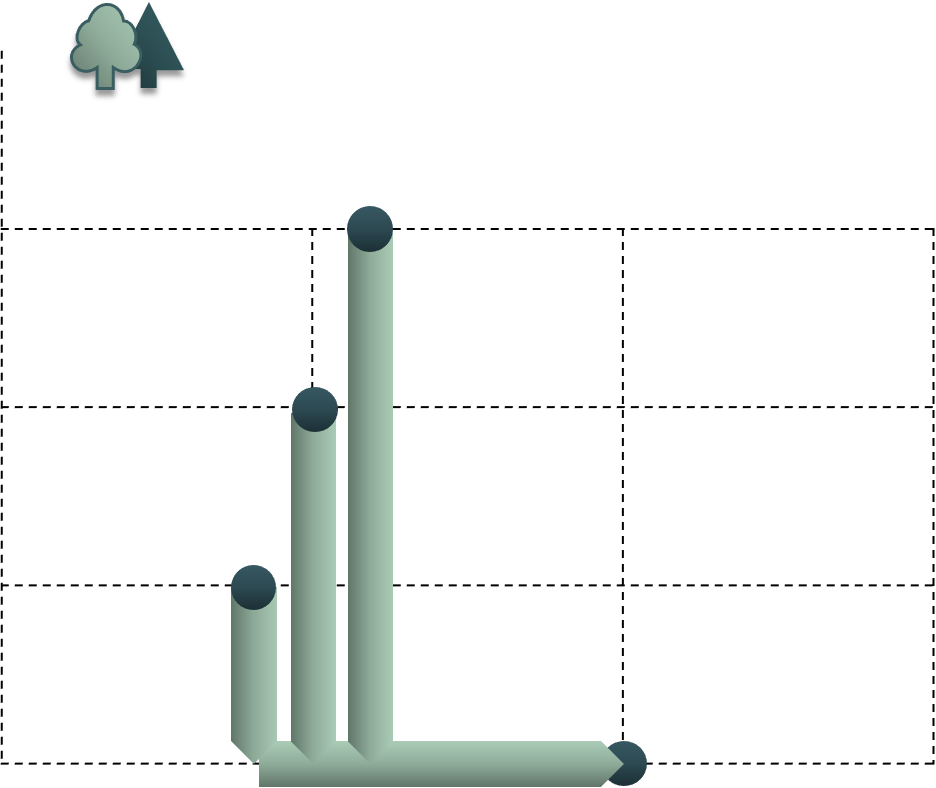 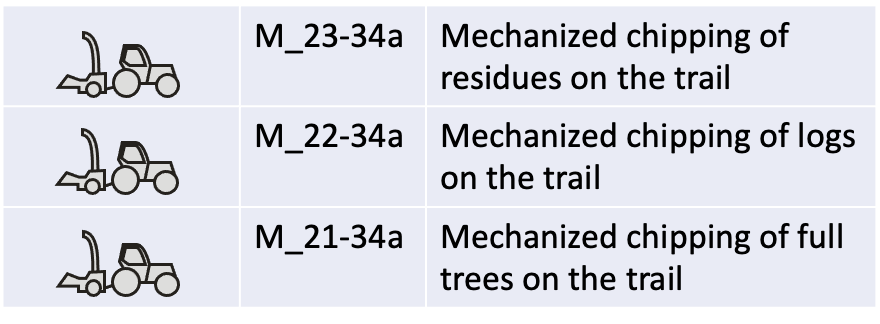 A specialized option is a biomass-harvester. This machine fells the tree and directly forms chips out of it (buffer 10 to 24).
| |
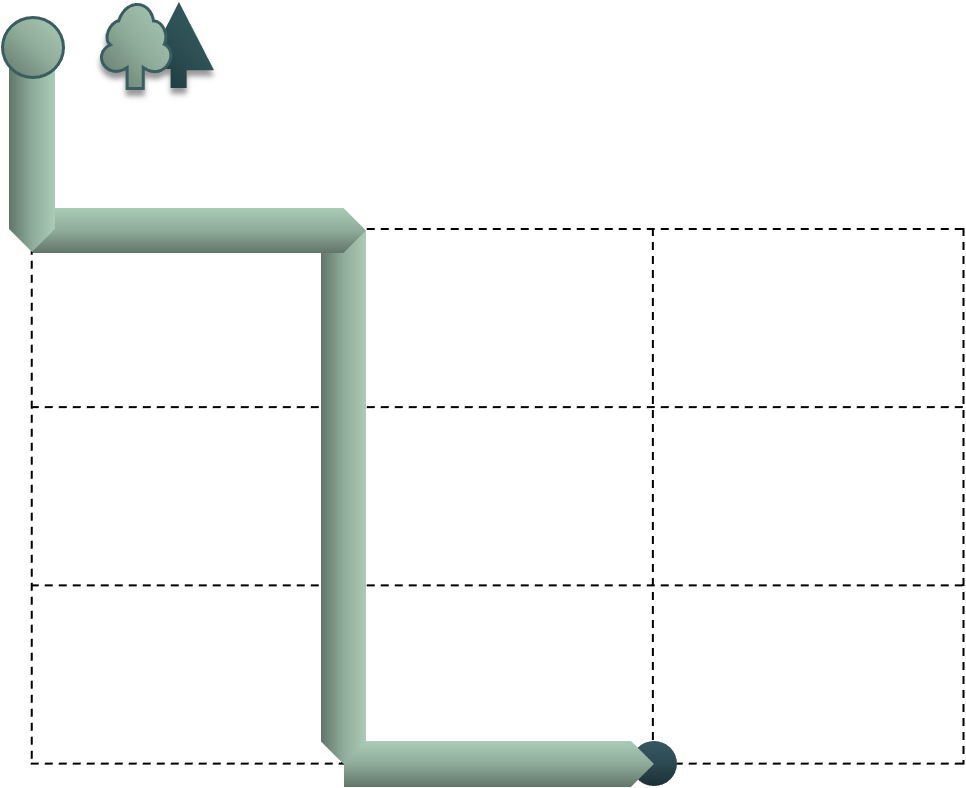

Solutions for cross-cuttingThe sub-process of cross-cutting describes the transformation from tree lengths or a full tree into short logs. It can be carried out either in combination with the delimbing of the tree or detached from the delimbing as a single function. If the tree is delimbed and cross-cut in one step, this is usually done on the trail (buffer 21 to 23) or the forest road (buffer 31 to 33). The combination of delimbing and cross-cutting is executed mechanically with a processor ( can also be executed with a harvester) on the trail or the forest road. If the tree length is cross-cut as a single function, it can be done either in the stand (buffer 12 to 13) or on the trail (buffer 22 to 23) or the forest road (buffer 32 to 33). Usually it is done motor-manually with a chainsaw. 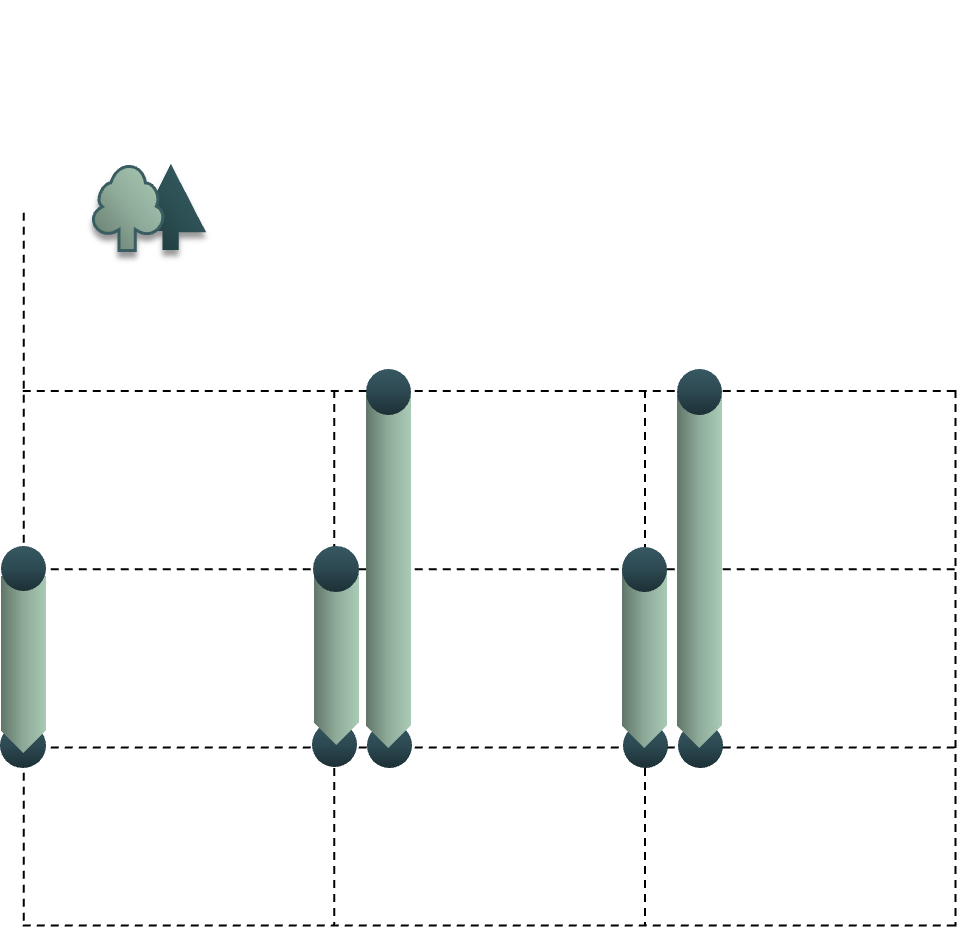 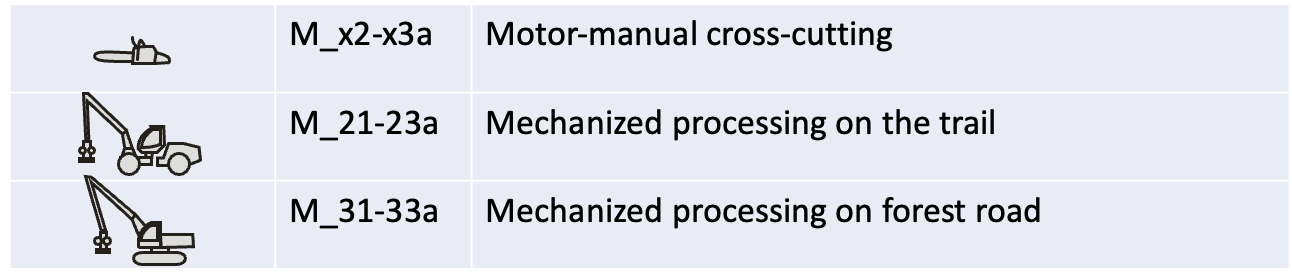 | |
