But since
the working method in nearly all cases is a composition of two or more
sub-processes, the ecogram of the method must be composed by the ecograms of
the sub-processes, too.
For
example, we have a fully mechanized ctl-method with harvester and forwarder.
Since the reach of the harvester is limited by the length of its crane, it
needs to drive near to each harvest tree. As long as the harvester may drive
offroad (=P1), this is no problem. But when we demand that the machine remains
on trails that also will be used in future (say permanently), the trails should
not be spaced further than twice the length of the crane, normally 20 m
(=P2). The assessment is very good on dry soil and less with increasing humidity.
Before the
forwarder comes, short logs are stored alongside the trail. So directly, the
distance of the trails doesn’t matter for this machine (but indirectly it does:
the wider the distance the higher the volume that must be transported on one
trail and therefore the higher the impact to the soil there). The compatibility
concerning soil moisture is the same as with the harvester.
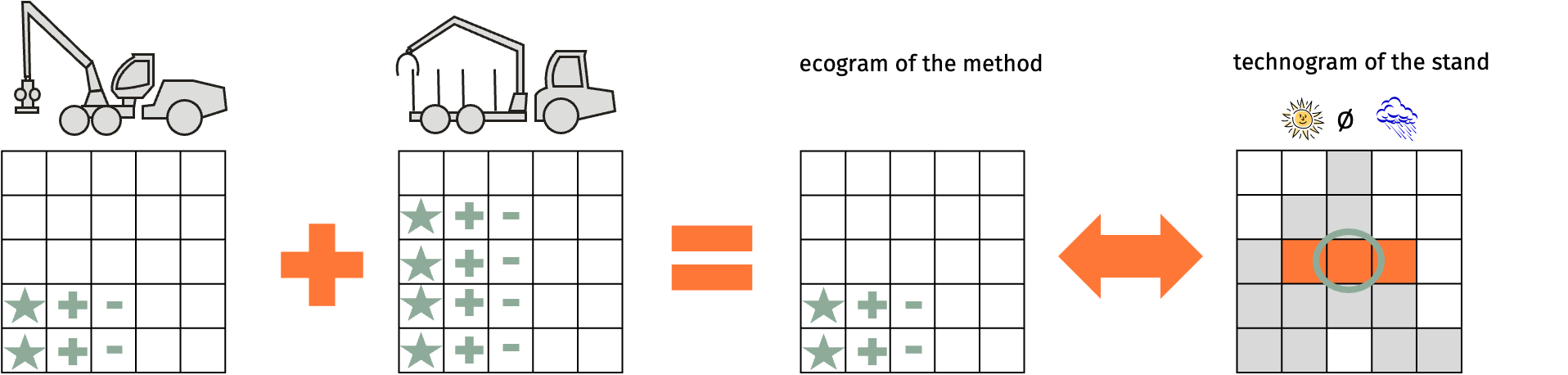
To combine
these two ecograms, we introduce the “bottle-neck-rule”: For each field in the
ecogram, the worst assessment of all procedural steps is used as final
assessment for the total method. Both, harvester and forwarder are assessed in
a similar way for the T-classes, but the harvester goes only for P1 and P2.
So, the total method also is
only compatible for P1 (driving without binding at permanent lines) and P2
(trails with 20 m distance). We see that this method does not fulfil the demands
of the forest owner that are expressed in the technogram.
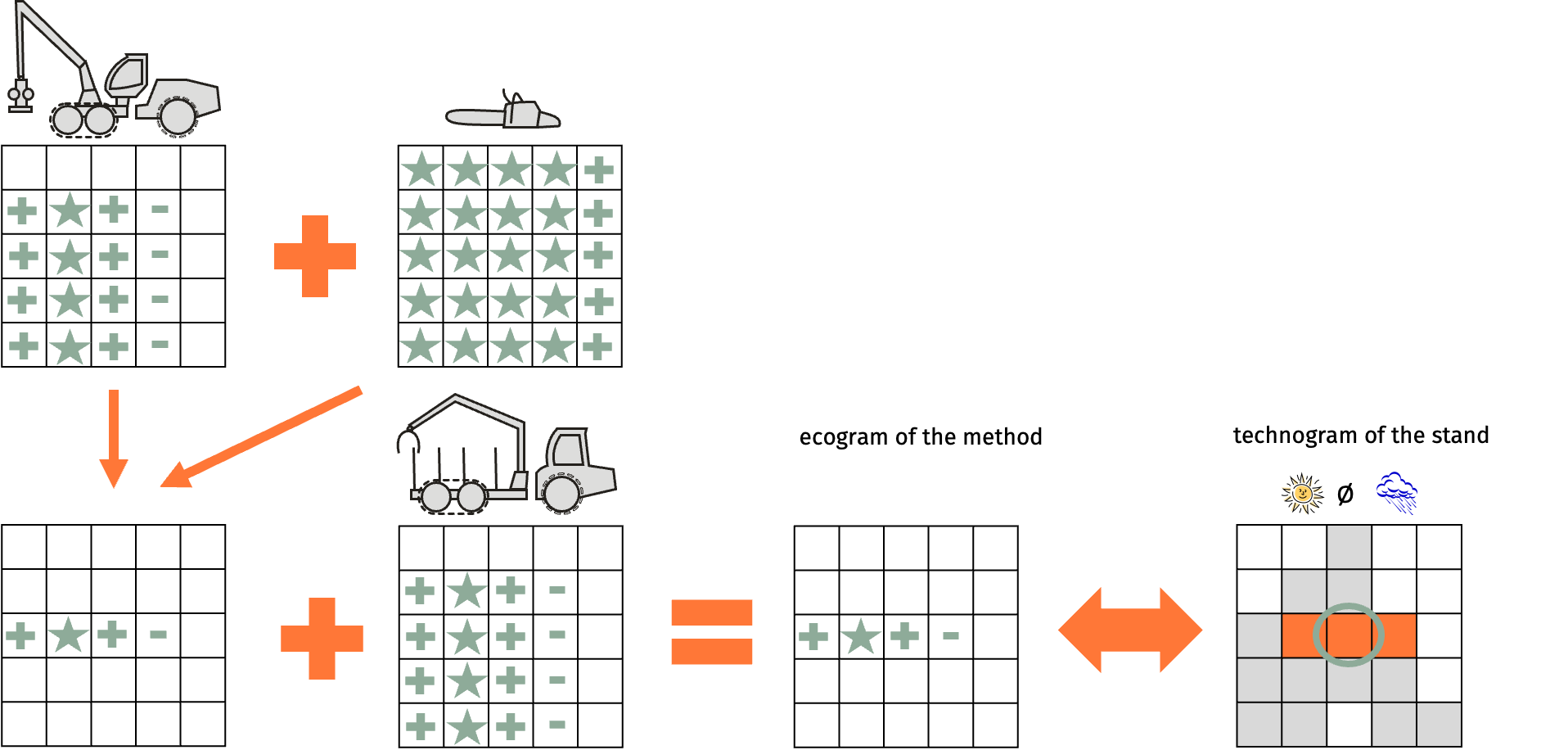
In another example,
a working method is composed by three sub-processes: felling with the chainsaw,
processing by machine and extraction by a forwarder fitted with bogie tracks. Each
sub-process has its own suitability that can be expressed by a typical ecogram.
Thus, first we must look at the ecograms of each sub-process.
The worker
with his chainsaw is compatible nearly everywhere. The ecogram shows
mostly star symbols, only under very wet conditions the walking can be limited.
The processor
(here a harvester that is working on the trail), is mainly limited by the
moisture; since the trees are pre-skidded to the trail it can be used under all
P-classes (except P5).
Both
sub-processes together only make sense at a trail distance of 40 m. Therefore,
the processing of this method is only reasonable at P-class 3 (=40 m). The assessment
whether the process is very good, good or limited compatible, depends on the
worst case; here the processor (again following the bottle-neck principle).
The
forwarder drives on the trails, too. Since the logs are pre-skid, it can be
used under all P-classes P1-P4 (except P5).
The common
ecogram of the total method again is a combination of the ecograms of processing
and extraction under observing the bottle-neck principle. When – like in this
example – the technogram of the stand demands for the fields P3-T2, -T3, and -T4,
this method is well compatible under normal and dry conditions.